(第7回)コントローラー(その2)
コントローラーの中にマイコンを入れるため、PS2のコントローラーの不要な部品を外したり、一部を切り取ったりします。クリアのコントローラーであれば、マイコンを中に入れることで、LEDを取り付けた時に見やすいので、中に入れます。
コントローラーの外に設置する場合は、マイコンをロボットの近くに設置するため、半田付けした配線が外れたり、別の配線と接触しないように注意してください。
1.コントローラー加工(マイコンを中へ設置する場合)
<使っている部品>
a.アナログコントローラ(DUALSHOCK 2)
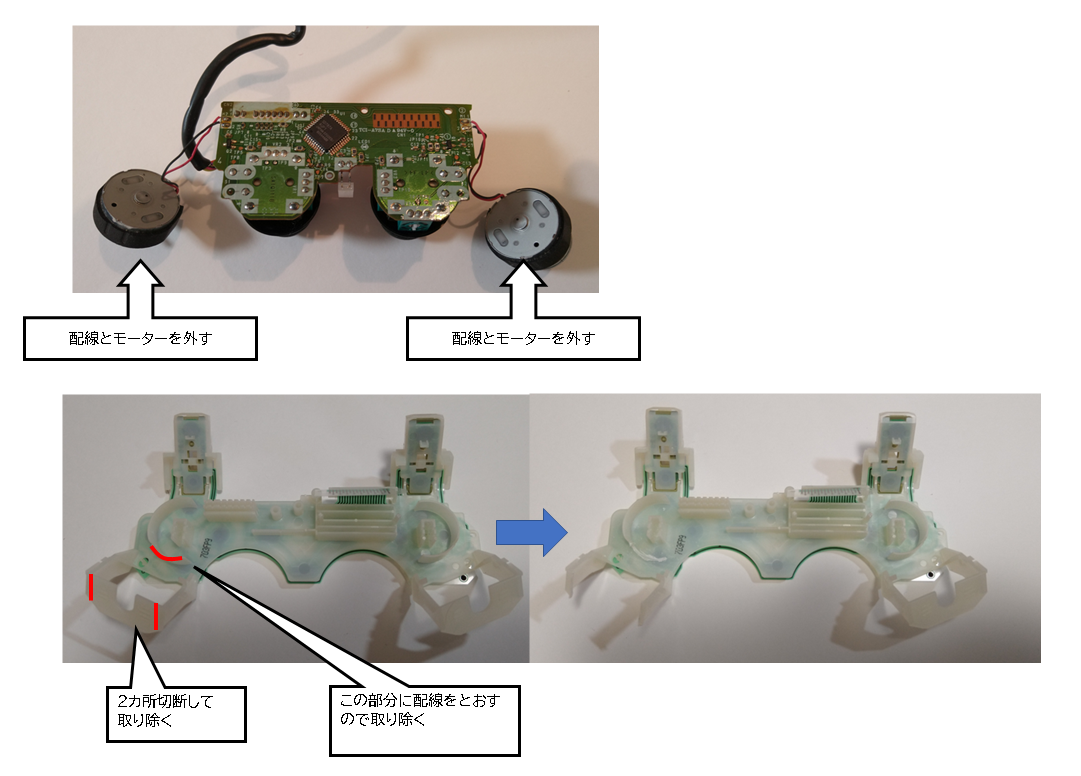
①回路基板のモーターと内部の部品の切り取りを行う
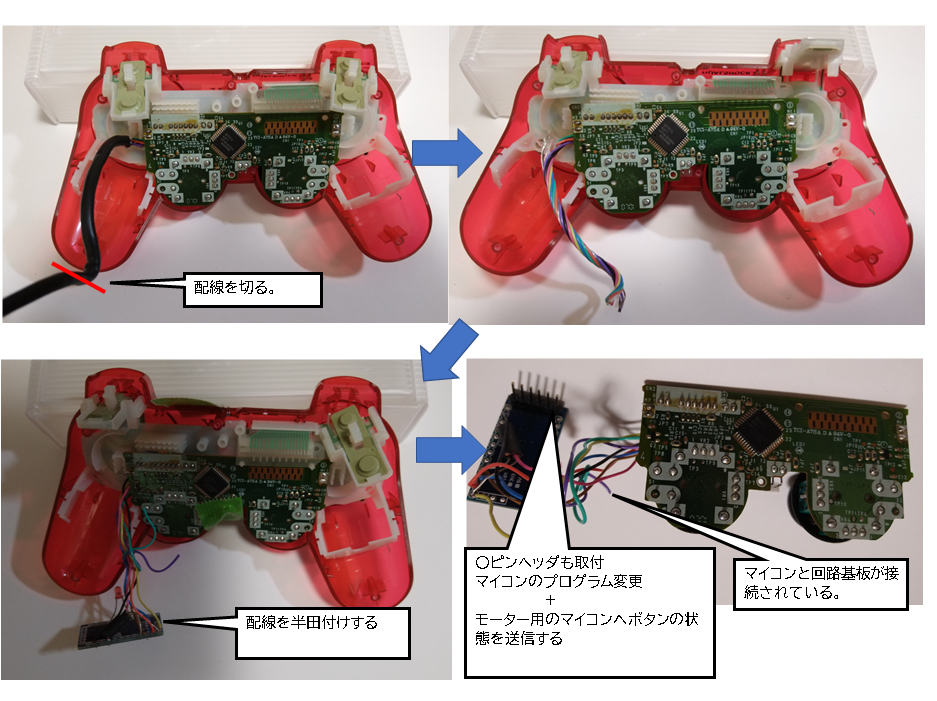
②回路基板とマイコンを配線する。ピンヘッダも取付を実施。ピンヘッダはプログラム書き込みとモーター用のマイコンへコントローラーの状態を送信するために利用します。
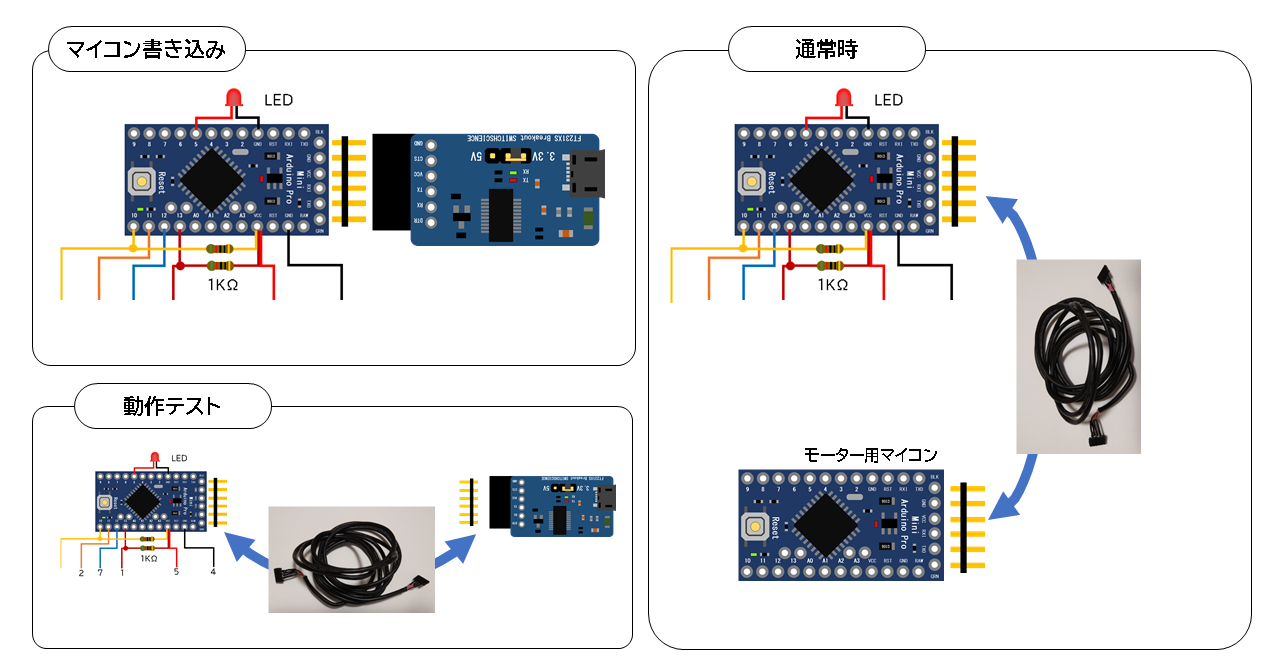
③ケーブルを作成します。マイコンを書き込む場合は6本の端子で通信する必要がありますが、「動作テスト」「通常時」のような通信だけの場合は、VCC、GND(電源)とTX、RXの4本になります。ケーブルはコントローラーの物を利用すると良いと思います。
注意!)2台のマイコンで通信する場合、GNDとVCCの電源は同じ端子に接続しますが、TXとRXは逆になります。(1台目TXと2台目RXを接続。1台目RXと2台目TXを接続)
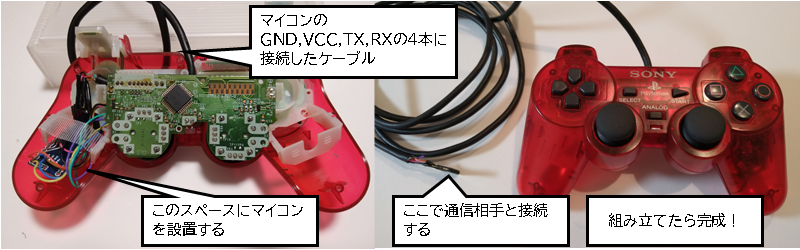
④最後にコントローラーを組み立てます。マイコンのピンヘッダに接続したケーブルを外に出します。このケーブルはPS2のケーブルを利用していれば、元通りに組み立てれば問題ないと思います。マイコン周辺のケーブルをはさんだりしないように慎重に組み立てて完成です。
コントローラーとマイコンは上手く接続できましたか?まえばしロボコンでは、3.3V電源ですので、そのままコントローラーの電源に使用することができます。コントローラーの入手は少し大変ですが、中古品を扱っているお店に行くと販売しています。
Arduinoも3.3Vの仕様の物なら直結できるので便利です。コントローラーを改造するのは少し手間がかかりますが、ゲームのコントローラーは操作性が良いので挑戦してみると良いと思います。
-------------